MT400N
Category : Large
Series : M Series
Model : MT400N
Payload : 400 Kg
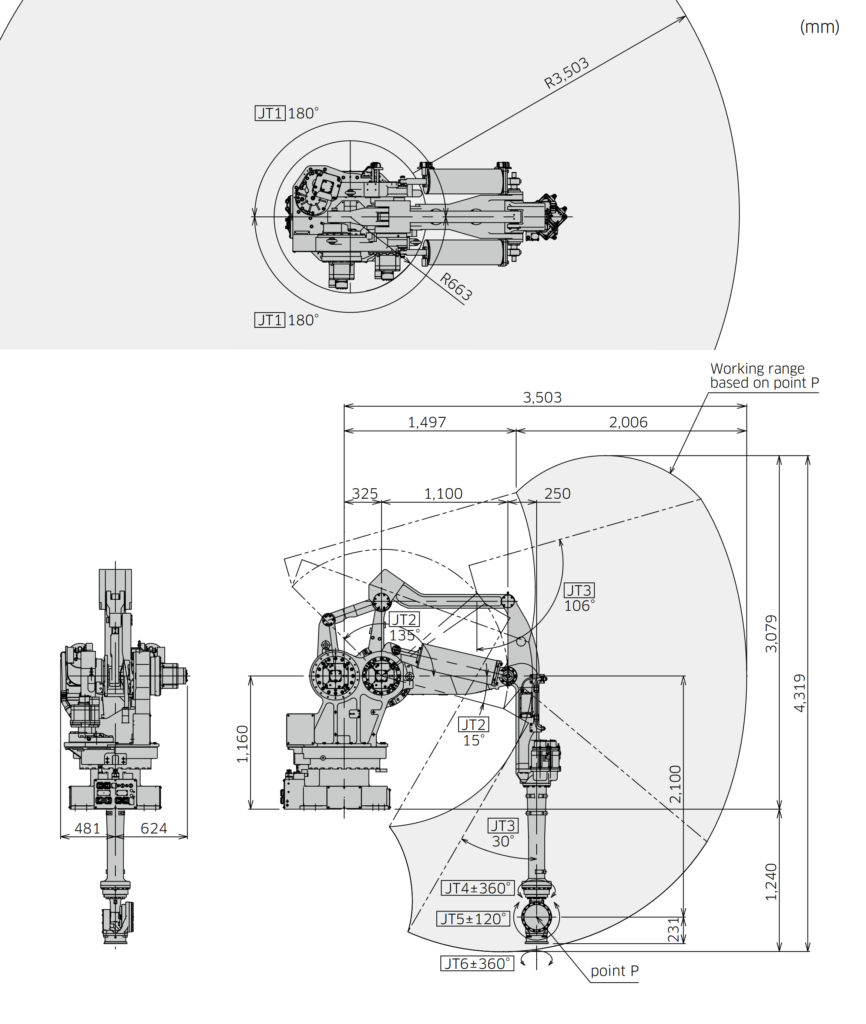
Max. Reach : 3503 mm
Degree of freedom : 6-axes
Supported Controller : F02
The shelf-mounted MT400N robot has a payload capacity of 400 kg, maximum horizontal reach of 3,503 mm and vertical reach of 4,319 mm, and was designed for vertical motion . Along with powerful motors, Kawasaki’s original link design for JT3 (arm up-down) gives the robot the power to lift heavy loads without the use of bulky and limiting counterweights, maximizing the robot’s motion range and allowing for a compact footprint.
| MT400N - Standard Specifications | ||
|---|---|---|
| Type | Articulated robot | |
| Degree of freedom (axes) | 6 | |
| Payload (kg) | 400 | |
| Max. reach (mm) | 3,503 | |
| Position repeatability*1 (mm) | ±0.5 | |
| Motion range (°) | Arm rotation (JT1) | ±180 |
| Arm out-in (JT2) | +15 ~ -135 | |
| Arm up-down (JT3) | +106 ~ -30 | |
| Wrist swivel (JT4) | ±360 | |
| Wrist bend (JT5) | ±120 | |
| Wrist twist (JT6) | ±360 | |
| Max. speed (°/s) | Arm rotation (JT1) | 80 |
| Arm out-in (JT2) | 70 | |
| Arm up-down (JT3) | 70 | |
| Wrist swivel (JT4) | 70 | |
| Wrist bend (JT5) | 70 | |
| Wrist twist (JT6) | 130 | |
| Allowable moment (N·m) | Wrist swivel (JT4) | 2,150 |
| Wrist bend (JT5) | 2,150 | |
| Wrist twist (JT6) | 980 | |
| Allowable moment of inertia (kg·m2) | Wrist swivel (JT4) | 200 |
| Wrist bend (JT5) | 200 | |
| Wrist twist (JT6) | 147 | |
| Mass (kg) | 2600 | |
| Mounting | Shelf | |
| Installation environment | Ambient temperature (°C) | 0 ~ 45 |
| Relative humidity (%) | 35 ~ 85 (No condensation, nor frost allowed) |
|
| Controller / Power requirements | F02 / 7.5kVA | |
| *1: Conforms to ISO9283 | ||